Since ResNet and other cnns that end with average pooling and a fully connected layer can use CAM without modifying the network structure, this article is based on AlexNet. Using Kaggle’s cat and dog dataset, the code is as follows:
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import Dataset
from PIL import Image
import glob
from torch.utils.data import DataLoader
import numpy as np
from torchvision.models import alexnet
from datetime import datetime
import time
import os
class train_ImageDataset(Dataset):
def __init__(self, root):
# Transforms for low resolution images and high resolution images
self. transform = transforms. Compose(
[
transforms.RandomHorizontalFlip(p=0.3),
transforms.RandomVerticalFlip(p=0.3),
transforms.Resize((256, 256)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])# Normalized
self.files = sorted(glob.glob(root + "/*.*"))
def __getitem__(self, index):
path = self.files[index % len(self.files)]
label = path[path.index(".")-3:path.index(".")]
img = Image.open(self.files[index % len(self.files)])
img = self. transform(img)
#print(img. shape)
#print(label)
if label == "cat":
label = [0, 1]
if label == "dog":
label = [1, 0]
label = torch. Tensor(label)
#print(label)
return img, label
def __len__(self):
return len(self. files)
class test_ImageDataset(Dataset):
def __init__(self, root):
# Transforms for low resolution images and high resolution images
self. transform = transforms. Compose(
[
transforms.Resize((256, 256)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])# Normalized
self.files = sorted(glob.glob(root + "/*.*"))
def __getitem__(self, index):
path = self.files[index % len(self.files)]
label = path[path.index(".")-3:path.index(".")]
img = Image.open(self.files[index % len(self.files)])
img = self. transform(img)
#print(img. shape)
#print(label)
if label == "cat":
label = [0, 1]
if label == "dog":
label = [1, 0]
label = torch. Tensor(label)
#print(label)
return img, label
def __len__(self):
return len(self. files)
def train(model, device, train_loader, optimizer, epoch, loss):
start_epoch = time. time()
model. train()
error_num = 0
sum_num = 0
sum_loss = 0
for i, (input, label) in enumerate(train_loader):
input = input.to(device)
target = label.to(device)
optimizer. zero_grad()
output = model(input)
Loss = loss(output, target)
Loss. backward()
optimizer. step()
pred = output.max(1, keepdim=True)[1].squeeze(1).cpu().numpy() # Find the subscript with the highest probability
target = target.max(1, keepdim=True)[1].detach().squeeze(1).cpu().numpy()
error_num += np.sum(np.abs(pred - target))
sum_num + = pred.shape[0]
sum_loss += Loss.item()
acc = 1.0 - error_num / sum_num
loss_avg = sum_loss / len(train_loader)
print("Train:[Epoch %d] [Loss: %f] [Acc: %f]" % (epoch, loss_avg, acc))
end_time = time. time()
times = end_time - start_epoch
print(times)
if epoch % 5 == 0:
with open(Log_txt, "a") as f:
f.write("Train:[Iterations %d] [Loss: %f] [Acc: %f] [Epoch Time: %f]\
" % (epoch, loss_avg, acc, times))
# test
def test(model, device, test_loader, epoch, loss):
model.eval()
with torch.no_grad():
error_num = 0
sum_num = 0
sum_loss = 0
for input, label in test_loader:
input = input.to(device)
target = label.to(device)
optimizer. zero_grad()
output = model(input)
Loss = loss(output, target)
pred = output.max(1, keepdim=True)[1].squeeze(1).cpu().numpy() # Find the subscript with the highest probability
target = target.max(1, keepdim=True)[1].detach().squeeze(1).cpu().numpy()
error_num += np.sum(np.abs(pred-target))
sum_num + = pred.shape[0]
sum_loss += Loss.item()
acc = 1.0 - error_num / sum_num
loss_avg = sum_loss / len(test_loader)
print("Test:[Epoch %d] [Loss: %f] [Acc: %f]"% (epoch, loss_avg, acc))
if epoch % 5 == 0:
with open(Log_txt, "a") as f:
f.write("Test:[Iterations %d] [Loss: %f] [Acc: %f]\
"% (epoch, loss_avg, acc))
class cnn(nn.Module):
def __init__(self):
super(cnn, self).__init__()
self.model = alexnet(pretrained=True)
self.encoder = nn.Sequential(*list(self.model.children())[0]) #Only take the convolution layer, if you use vgg16, just change alexnet to vgg16
self.avg = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(256,2)
def forward(self, x):
x = self.encoder(x) #batchsize*256*7*7
x = self.avg(x)
x = x.view(x.shape[0], -1)
x = self.fc(x)
return x
if __name__ == '__main__':
os.makedirs("log",exist_ok=True)
os.makedirs("saved_model", exist_ok=True)
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
Log_txt = "./log/" + str(datetime.now()).replace(" ","_").replace(":","_") + "_result.txt"
start_all_time = time. time()
train_loader = DataLoader(
train_ImageDataset("./train"),
batch_size=256,
shuffle=True,
num_workers=0,
)
test_loader = DataLoader(
test_ImageDataset("./test"),
batch_size=256,
shuffle=True,
num_workers=0,
)
model = cnn().to(DEVICE)
print(model)
optimizer = optim.Adam(model.parameters(), lr=0.0001)
loss = torch.nn.CrossEntropyLoss().to(DEVICE)
EPOCH = 50
for epoch in range(1, EPOCH + 1):
train(model, DEVICE, train_loader, optimizer, epoch, loss)
test(model, DEVICE, test_loader, epoch, loss)
torch.save(model.state_dict(), './saved_model/AlexNet_oriCAM_CAT & amp;DOG_iteration_' + str(epoch) + '.pth') # Save the model after training
end_all_time = time. time()
time_all = end_all_time - start_all_time
with open(Log_txt, "a") as f:
f.write("All Time: %f" % (time_all))
If you need to output class activation heatmap, the code is as follows:
import os
from torch.utils.data import Dataset
import glob
from torch.utils.data import DataLoader
import pandas as pd
import cv2
import torch
import torch.nn as nn
from torchvision.models import alexnet
from torchvision import datasets, transforms
import numpy as np
from PIL import Image
mean=[0.485, 0.456, 0.406]
std=[0.229, 0.224, 0.225]
class test_ImageDataset(Dataset):
def __init__(self, root):
# Transforms for low resolution images and high resolution images
self. transform = transforms. Compose(
[
transforms.Resize((256, 256)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])# Normalized
self.files = sorted(glob.glob(root + "/*.*"))
def __getitem__(self, index):
path = self.files[index % len(self.files)]
label = path[path.index(".")-3:path.index(".")]
img = Image.open(self.files[index % len(self.files)])
img = self. transform(img)
#print(img. shape)
#print(label)
if label == "cat":
label = [0, 1]
if label == "dog":
label = [1, 0]
label = torch. Tensor(label)
#print(label)
return img, label
def __len__(self):
return len(self. files)
def denormalize(tensors):
""" Denormalizes image tensors using mean and std """
for c in range(3):
tensors[c,:,:].mul_(std[c]).add_(mean[c])
return torch.clamp(tensors, 0, 255)
class cnn(nn.Module):
def __init__(self):
super(cnn, self).__init__()
self.model = alexnet(pretrained=True)
self.encoder = nn.Sequential(*list(self.model.children())[0])
self.avg = nn.AdaptiveAvgPool2d((1,1))
self.fc = nn.Linear(256,2)
def forward(self, x):
xx = self.encoder(x) #batchsize*256*7*7
x = self.avg(xx)
x = x.view(x.shape[0], -1)
x = self.fc(x)
return x, xx
# test
def test(model, device, test_loader):
model.eval()
for name, param in model.named_parameters():
if name=="fc.weight":
w = param.detach().cpu().numpy()
break
with torch.no_grad():
index = 1
for data, target in test_loader:
data_de = denormalize(data.squeeze()) #Prevent subsequent data from becoming cuda
data, target = data.to(device), target.to(device)
true_output, featuremap = model(data)
featuremap = featuremap.detach().squeeze().cpu().numpy()
pred = true_output.max(1, keepdim=True)[1].squeeze(1).cpu().numpy() # Find the subscript with the highest probability
#print(target)
target = target.max(1, keepdim=True)[1].detach().squeeze(1).cpu().numpy()
bo = (pred == target)
dir = "./oriCAM_output/test/%d_attentionMap_%d_%s" % (index, int(pred[0]), str(bo))
os.makedirs(dir, exist_ok=True)
ori__img = np.array(data_de)[::-1, :, :].transpose(1, 2, 0) * 255.0
ori_img = cv2.resize(ori__img, (500, 500))
original_img = ori_img.astype(np.uint8)
cv2.imwrite("%s/%d_ORIImg.jpg" % (dir, index), original_img)
prediction = int(pred[0])
weight = w[prediction,:]
activation_img = np.zeros((featuremap.shape[1],featuremap.shape[2]))
for num2 in range(featuremap.shape[0]):
feature_img = featuremap[num2, :, :] * weight[num2]
activation_img += feature_img
activation_img = (activation_img - np.min(activation_img)) / (
np.max(activation_img) - np.min(activation_img)) * 255.0
activation_img = cv2.resize(activation_img, (500, 500))
activation_img = activation_img.astype(np.uint8)
image = cv2.applyColorMap(activation_img, cv2.COLORMAP_JET)
add_img = cv2. addWeighted(image, 0.7, original_img, 0.3, 0)
cv2.imwrite("%s/%d_AttImg.jpg" % (dir, index), image)
cv2.imwrite("%s/%d_AddImg.jpg" % (dir, index), add_img)
index += 1
if __name__ == '__main__':
BATCH_SIZE = 1 # About 2G of video memory is required
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu") # Let torch determine whether to use GPU, it is recommended to use GPU environment, because it will be much faster
# Download the test set
test_loader = DataLoader(
test_ImageDataset("./test"),
batch_size=BATCH_SIZE,
shuffle=False,
num_workers=0,
)
model = cnn().to(DEVICE)
model.load_state_dict(torch.load("./saved_model/AlexNet_oriCAM_CAT & amp;DOG_iteration_50.pth"))
test(model, DEVICE, test_loader)


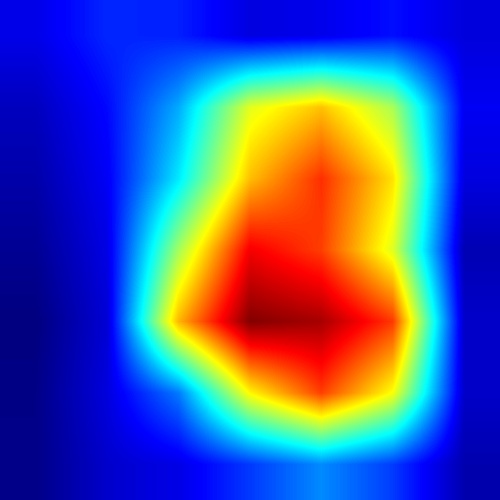
It can be seen from the above picture that the effect is still good~